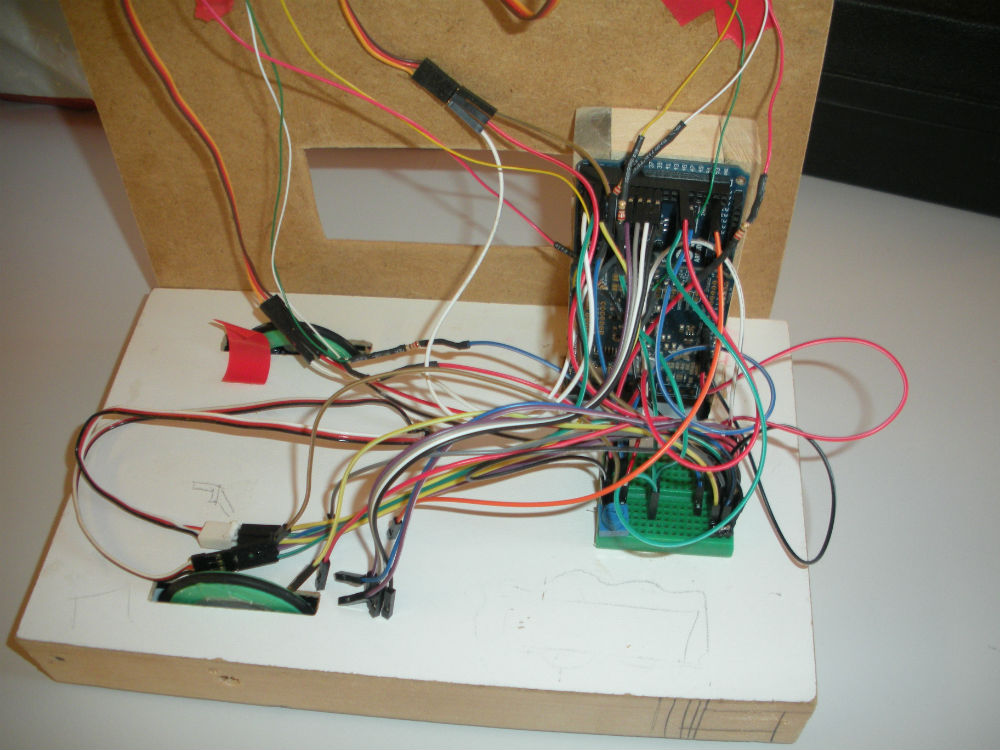
Pruebas de sonido por eso con el micrófono dentro del robot gravamos para luego reproducir.
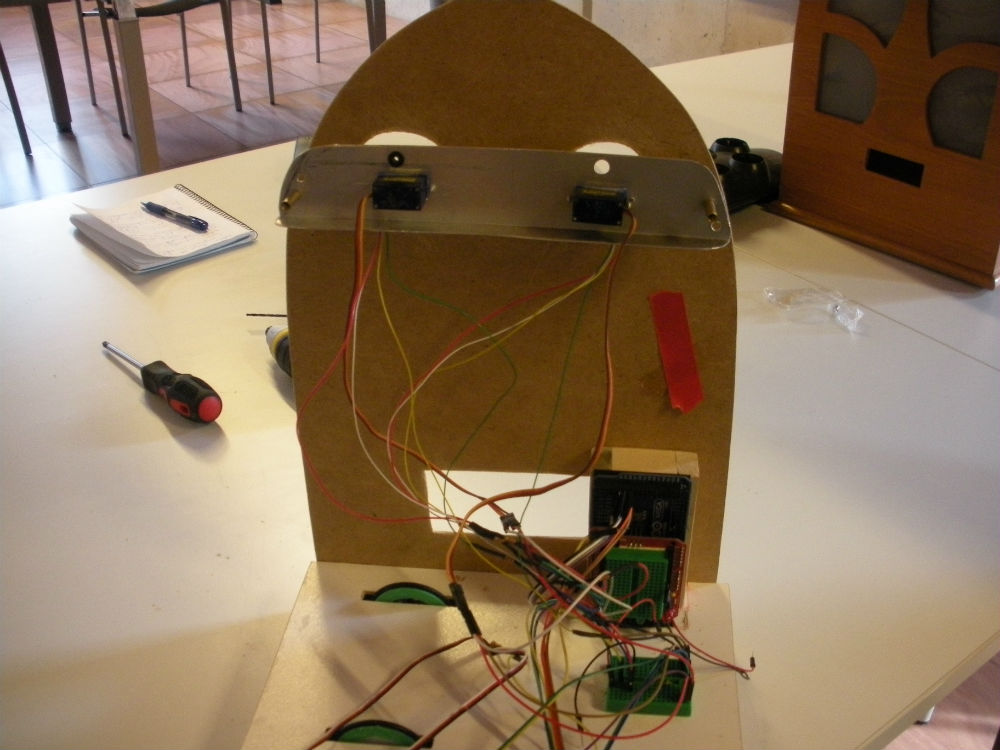
Encastar el micrófono en el robot para gravar mejor. Colocar con tornillos.
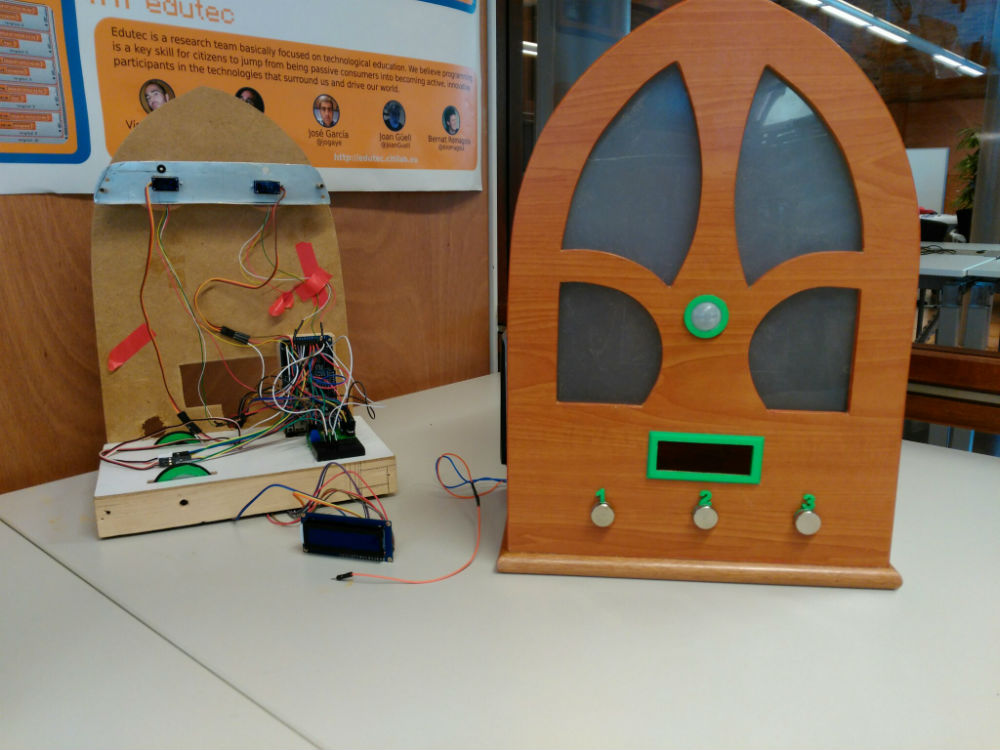
La madera es muy adecuada para el sonido se escucha mejor.
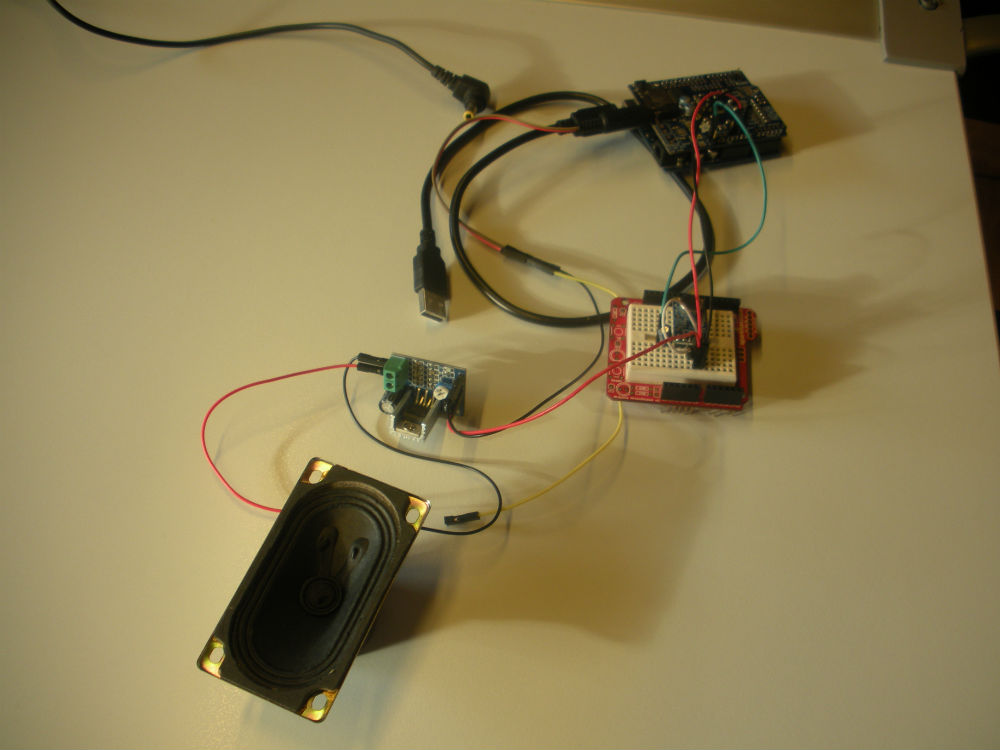
Soldamos los cables con estaño para probar los altavoces del robot.
Hay que buscar diferentes voces porque hay que elegir la voz o voces más adecuadas.