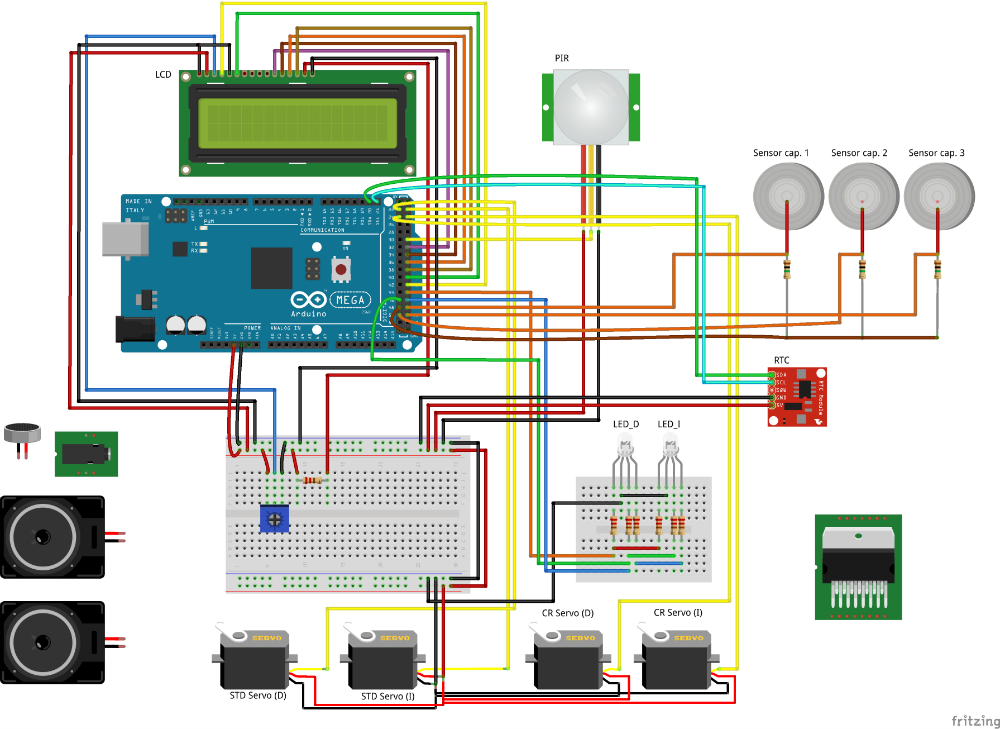
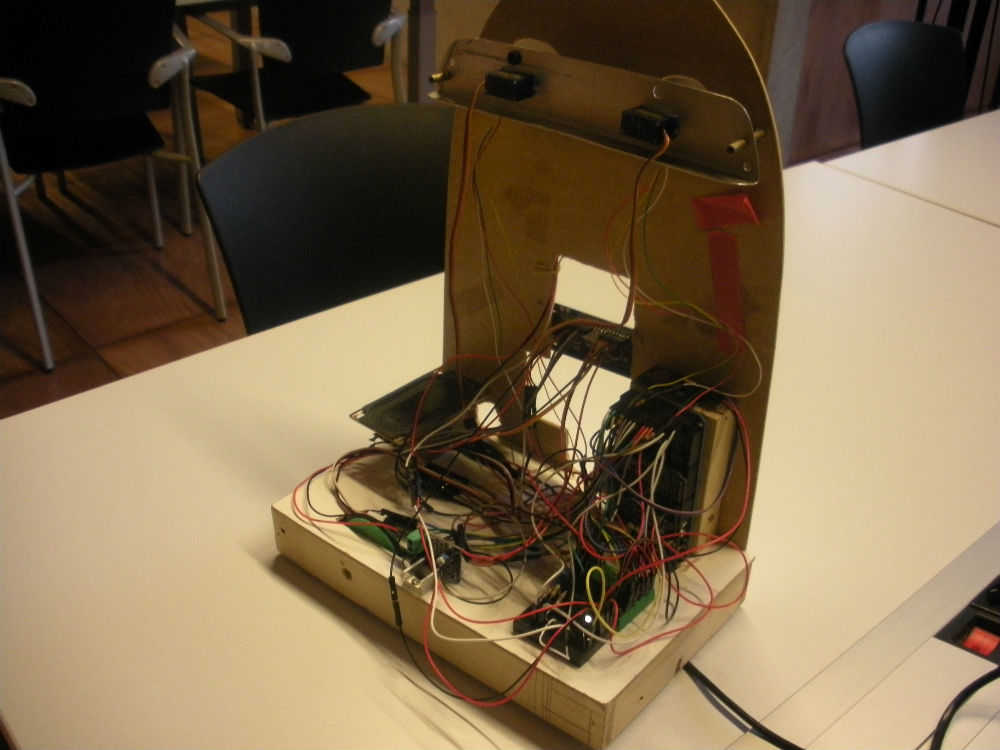
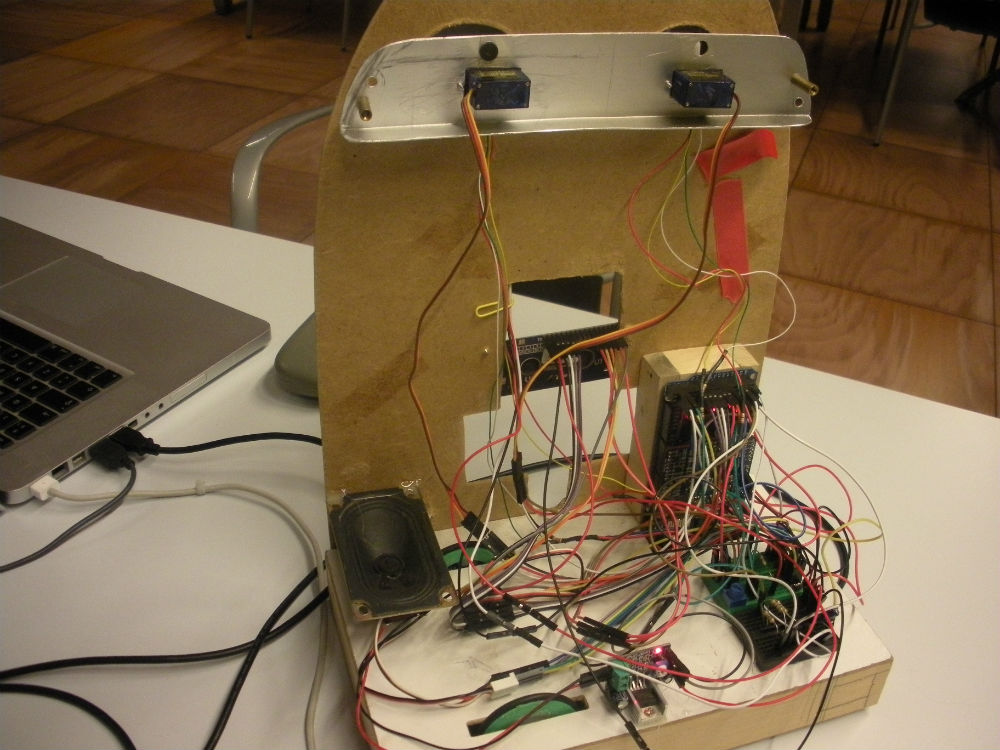
Hemos realizado un esquema para facilitar el montaje de las conexiones. Nos falta cablear la parte de audio.
Seguimos haciendo pruebas para para comprobar cada elemento:
- El audio funciona.
- El display funciona.
- El movimiento funciona.
- Los ojos funcionan.
- El sensor de presencia PIR funciona.
- Los botones táctiles no funcionan correctamente.
Al pulsar un boton táctil se contagian los otros pulsadores. Una solución es separar los cables de los sensores táctiles el maximo posible y hemos comprobado que funcionan mejor.
Este es un avance del esquema del Robot que podeis consultar.